ocrobot:modules:l298p
L298P 电机驱动板
介绍
L298P电机驱动板介绍 OCROBOT L298P基于arduino的大功率电动机驱动扩展盾,使用完整的光电电气隔离设计,上扩展盾与下所有光耦合隔离主控板,电源部分分别独立的电源,两路电机驱动,安全可靠,抗干扰能力强。
参数
极限输入电压:24V
极限电流:2A
可靠工作电压(无辅助散热):12V
可靠工作电流(无辅助散热):1A
完整的隔离方案,信号采用光耦隔离器件隔离,驱动芯片的电源采用5V 1:1隔离电源,彻底与arduino电气上保持独立,避免干扰的产生
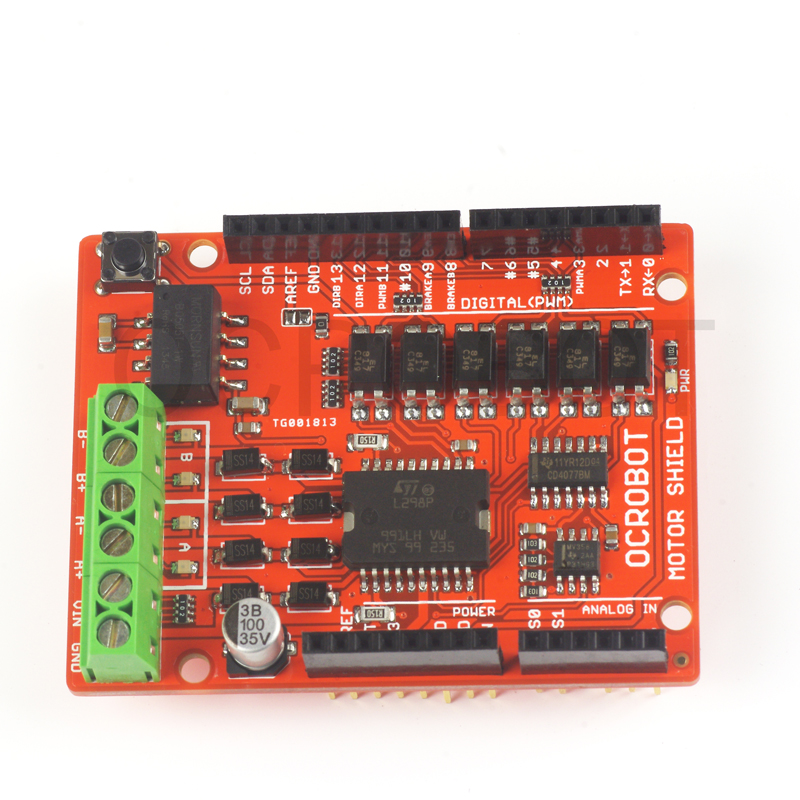
图片
相关介绍
| 功能 | 电机A | 电机B |
| 方向 | D12 | D13 |
| 速度(PWM) | D3 | D11 |
| 制动(不启用电机) | D9 | D8 |
参考以上的管脚定义功能介绍,我们就可以准确方便的控制电机了。。首先要将使能端管脚低电平,使电机可以使用,然后确定方向管脚的高低电平,确认方向,最后pwm口控制电机转速全速使用digitalWrite()语句, 其他速度使用analogWrite()进行设置。
示例代码
A通道电机全速正反转
/* 作者:迷你强 时间:2013年8月31日 IDE版本号:1.0.4 发布地址:www.geek-workshop.com 作用:电机驱动板演示程序,让A路电机全速正转与反转 */ void setup() { pinMode(12,OUTPUT); pinMode(3,OUTPUT); pinMode(9,OUTPUT); //启用电机A的三个管脚,全部设置为输出状态 } void loop() { digitalWrite(9, LOW); //松开电机A的制动 digitalWrite(3, HIGH); //采用全功率输出 digitalWrite(12, HIGH); //设置方向为正向 delay(1000); //运行1秒 digitalWrite(9, HIGH); //电机停止运行 delay(1000); //维持1秒钟 digitalWrite(9, LOW); //松开电机A的制动 digitalWrite(3, HIGH); //采用全功率输出 digitalWrite(12, LOW); //设置方向为反向 delay(1000); //运行1秒 }
B通道电机全速正反转
/* 作者:迷你强 时间:2011年8月11日 IDE版本号:1.0.4 发布地址:www.geek-workshop.com 作用:电机驱动板演示程序,让A路电机全速正转与反转 */ void setup() { pinMode(13,OUTPUT); pinMode(11,OUTPUT); pinMode(8,OUTPUT); //启用电机B的三个管脚,全部设置为输出状态 } void loop() { digitalWrite(8, LOW); //松开电机B的制动 digitalWrite(11, HIGH); //采用全功率输出 digitalWrite(13, HIGH); //设置方向为正向 delay(1000); //运行1秒 digitalWrite(8, HIGH); //电机停止运行 delay(1000); //维持1秒钟 digitalWrite(8, LOW); //松开电机B的制动 digitalWrite(11, HIGH); //采用全功率输出 digitalWrite(13, LOW); //设置方向为反向 delay(1000); //运行1秒 }
A通道电机半速正反转:
/* 作者:迷你强 时间:2013年8月31日 IDE版本号:1.0.4 发布地址:www.geek-workshop.com 作用:电机驱动板演示程序,让A路电机半功率正转与反转,如果发现电机无法转动,请适当调高输出功率 范围0-255 */ void setup() { pinMode(12,OUTPUT); pinMode(3,OUTPUT); pinMode(9,OUTPUT); //启用电机A的三个管脚,全部设置为输出状态 } void loop() { digitalWrite(9, LOW); //松开电机A的制动 analogWrite(3, 128); //50%功率输出 digitalWrite(12, HIGH); //设置方向为正向 delay(1000); //运行1秒 digitalWrite(9, HIGH); //电机停止运行 delay(1000); //维持1秒钟 digitalWrite(9, LOW); //松开电机A的制动 analogWrite(3, 128); //50%功率输出 digitalWrite(12, LOW); //设置方向为反向 delay(1000); //运行1秒 }
B通道电机半速正反转:
/* 作者:迷你强 时间:2011年8月11日 IDE版本号:1.0.4 发布地址:www.geek-workshop.com 作用:电机驱动板演示程序,让B路电机半功率正转与反转,如果发现电机无法转动,请适当调高输出功率 范围0-255 */ void setup() { pinMode(13,OUTPUT); pinMode(11,OUTPUT); pinMode(8,OUTPUT); //启用电机B的三个管脚,全部设置为输出状态 } void loop() { digitalWrite(8, LOW); //松开电机B的制动 analogWrite(11, 128); //50%功率输出 digitalWrite(13, HIGH); //设置方向为正向 delay(1000); //运行1秒 digitalWrite(8, HIGH); //电机停止运行 delay(1000); //维持1秒钟 digitalWrite(8, LOW); //松开电机B的制动 analogWrite(11, 128); //50%功率输出 digitalWrite(13, LOW); //设置方向为反向 delay(1000); //运行1秒 }
ocrobot/modules/l298p.txt · 最后更改: 2023/06/07 04:23 由 127.0.0.1