ocrobot:sensor_suite:gps:main
GPS实时定位仪
OCROBOT GPS实时定位仪采用OCROBOT ALPHA系列模块堆叠而成。 本模型可以在户外露天的状态下,实时显示当前所属位置的日期、经度、纬度、定位状态与有效卫星、水平定位精度与椭球高度(单位:米)、航向(单位:度)与速度(单位:千米/小时)、海平面高度(单位米)。
图片展示

主要硬件
- OCROBOT ALPHA 8F32P-U主控板
- OCROBOT ALPHA GPS定位/授时 模块
- OCROBOT ALPHA LCD1602显示屏
- OCROBOT ALPHA 双路锂电池扩展板
示例程序
需要OCROBOT_APLHA_GPS_Module 库
github:https://github.com/534659123/OCROBOT_APLHA_GPS_Module
#include <Wire.h> #include <LiquidCrystal_I2C.h> #include <OCROBOT_I2C_GPS.h> GPS GPS(0x02); LiquidCrystal_I2C lcd(0x20,16,2); byte hh,mm,ss,ms; byte y,m,d; uint16_t delayTime = 3000; void setup() { Wire.begin(); lcd.init(); lcd.backlight(); } void loop() { /*显示时间*/ GPS.UtcDate(y,m,d); GPS.UtcTime(hh,mm,ss,ms); lcd.setCursor(0, 0); lcd.print("DATE:"); lcd.print("20"); lcd.print(y); lcd.print("/"); lcd.print(m); lcd.print("/"); lcd.print(d); lcd.setCursor(0, 1); lcd.print("Time:"); lcd.print(hh); lcd.print(":"); lcd.print(mm); lcd.print(":"); lcd.print(ss); lcd.print(":"); lcd.print(ms); delay(delayTime); lcd.clear(); /*显示纬度经度*/ lcd.setCursor(0, 0); lcd.print(GPS.LatitudeDirection()); //纬度 WGS84坐标系 lcd.print(":"); lcd.print(GPS.Latitude(),4); lcd.setCursor(0, 1); lcd.print(GPS.LongitudeDirection()); //经度 WGS84坐标系 lcd.print(":"); lcd.print(GPS.Longitude(),4); delay(delayTime); lcd.clear(); /*定位状态与有效卫星*/ lcd.setCursor(0, 0); lcd.print("Pos:"); lcd.print(GPS.Positioning()); //定位状态 0:无定位 1:SPS 模式定位 2:差分、SPS模式定位 3 :PPS 模式定位 lcd.setCursor(0, 1); lcd.print("Sat:"); lcd.print(GPS.Satellite()); //有效卫星数量 delay(delayTime); lcd.clear(); /*水平定位精度与椭球高度*/ lcd.setCursor(0, 0); lcd.print("HDOP:"); lcd.print(GPS.HDOP()); //水平精度 单位米 lcd.setCursor(0, 1); lcd.print("MSL:"); lcd.print(GPS.MSL()); //椭球高,单位米 delay(delayTime); lcd.clear(); /*航向与速度*/ lcd.setCursor(0, 0); lcd.print("Course:"); lcd.print(GPS.Course()); // 航向 单位度 lcd.setCursor(0, 1); lcd.print("Speed:"); lcd.print(GPS.Speed()); //速度,单位千米/小时 lcd.print("km/h"); delay(delayTime); lcd.clear(); /*海平面高*/ lcd.setCursor(0, 0); lcd.print("SeaLevel:"); lcd.print(GPS.SeaLevel()); // 海平面高,单位米 delay(delayTime); lcd.clear(); }
修改设备地址
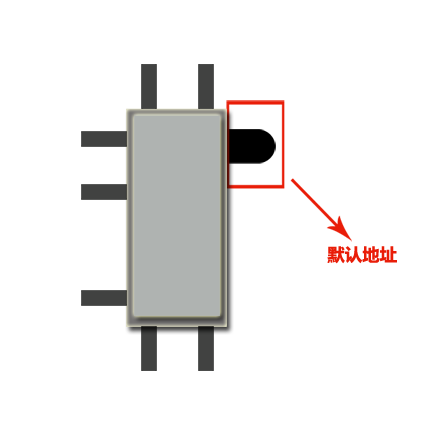
本设备默认地址为2 十六进制:0x02,如需自定义I2C地址,首先准备如下程序 【在默认地址模式下,使用下面的程序更新自定义地址】
#include <Wire.h> /***********/ byte I2CAddr = 10; //需要修改的地址,请自行修改 (取值范围1-127) /***********/ void setup() { Wire.begin(); // 初始化I2C接口 Serial.begin(9600); Wire.beginTransmission(2); //设备默认地址 本设备GPS模块 = 2 Wire.write(200); // 修改地址的操作码 Wire.write(I2CAddr); //向I2C设备写入新地址 Wire.endTransmission(); // stop transmitting Serial.println("OK"); //串口显示OK则完成写入,拨动模块开关并重新上电即可 } void loop() { }
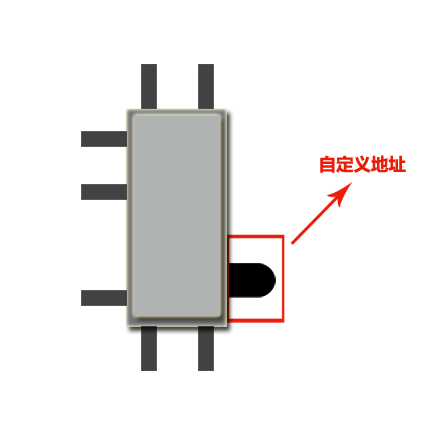
自行修改程序中需要写入的地址,程序显示OK后,拨动开关,断电后即可。
拨动开关示意图
ocrobot/sensor_suite/gps/main.txt · 最后更改: 2023/06/07 04:23 由 127.0.0.1