ocrobot:alpha:kitone:tutorial04
Blink(单LED闪烁)
这个例程显示了你可以用OCROBOT各款控制器做到的最简单的事,单LED闪烁(Blink)。
硬件
搭建电路
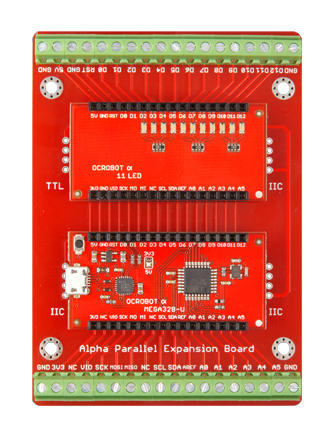
- ALPHA 11 LED模块插入并行扩展版1号槽位。
- ALPHA MEGA328-U模块插入并行扩展板2号槽位。
- USB线连接计算机与ALPHA MEGA328-U。
代码
/* Blink 让LED亮一秒,灭一秒,重复 */ int led = 2; // 我们在2号脚上连了一个LED.定义一个名为led的变量,赋值为2(也就是2号管脚)。 void setup() { // 按下reset键之后,setup中的代码执行一次: pinMode(led, OUTPUT); // 设置数字输出 } void loop() { // loop中代码一直重复执行: digitalWrite(led, HIGH); // 点亮LED (HIGH 意思是高电平) delay(1000); // 等待1秒 digitalWrite(led, LOW); // 熄灭LED(LOW 意思是低电平) delay(1000); // 等待1秒 }
这个例子中我们使用了3个新的函数:pinMode()、digitalWrite()、delay()。
pinMode()在程序中定义了led管脚输出状态。digitalWrite()使led管脚输出高电平或者低电平。delay()产生延时。
通过digitalWrite()与delay()配合我们可以产生各种不同led亮灭的效果。
如果让led亮三秒、灭1秒、再亮两秒、灭3秒应该怎样实现?
练习题代码
/* Blink 让LED亮一秒,灭一秒,重复 */ int led = 2; // 我们在2号脚上连了一个LED.定义一个名为led的变量,赋值为2(也就是2号管脚)。 void setup() { // 按下reset键之后,setup中的代码执行一次: pinMode(led, OUTPUT); // 设置数字输出. } void loop() { // loop中代码一直重复执行: digitalWrite(led, HIGH); // 点亮LED (HIGH 意思是高电平) delay(3000); // 等待3秒 digitalWrite(led, LOW); // 熄灭LED(LOW 意思是低电平) delay(1000); // 等待1秒 digitalWrite(led, HIGH); // 点亮LED (HIGH 意思是高电平) delay(2000); // 等待2秒 digitalWrite(led, LOW); // 熄灭LED(LOW 意思是低电平) delay(3000); // 等待3秒 }
ocrobot/alpha/kitone/tutorial04.txt · 最后更改: 2023/06/07 04:23 由 127.0.0.1