ocrobot:kit:arduino_star_kit:tutorial016
超声波传感器测距
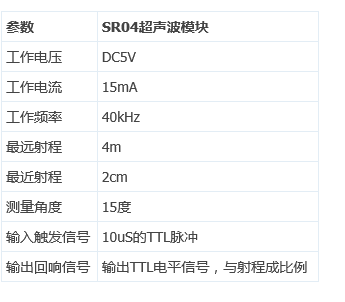
这个例程展示如何使用SR04超声波模块来进行距离测量。
科学家们将每秒钟振动的次数称为声音的频率,它的单位是赫兹(Hz)。我们人类耳朵能听到的声波频率为20Hz~20000Hz。当声波的振动频率小于20Hz或大于 20000Hz时,我们便听不见了。因此,我们把频率高于20000赫兹的声波称为“超声波”。由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
超声波测距原理: 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/2 。这就是所谓的时间差测距法。 超声波测距的原理是利用超声波在空气中的传播速度为已知,测量声波在发射后遇到障碍物反射回来的时间,根据发射和接收的时间差计算出发射点到障碍物的实际距离。由此可见,超声波测距原理与雷达原理是一样的。
测距的公式表示为:L=C×T
式中L为测量的距离长度;C为超声波在空气中的传播速度;T为测量距离传播的时间差(T为发射到接收时间数值的一半)。
搭建电路

代码
const int TrigPin = 8; const int EchoPin = 9; float cm; void setup() { Serial.begin(9600); pinMode(TrigPin, OUTPUT); pinMode(EchoPin, INPUT); } void loop() { digitalWrite(TrigPin, LOW); //低高低电平发一个短时间脉冲去TrigPin delayMicroseconds(2); digitalWrite(TrigPin, HIGH); delayMicroseconds(10); digitalWrite(TrigPin, LOW); cm = pulseIn(EchoPin, HIGH) / 58.0; //将回波时间换算成cm Serial.print(cm); Serial.print("cm"); Serial.println(); delay(1000); }
XNzE3NzQ1NzE2
ocrobot/kit/arduino_star_kit/tutorial016.txt · 最后更改: 2023/06/07 04:23 由 127.0.0.1